Quadcopter Platform Tracking and Landing AE 483: Autonomous Systems Lab | Fall 2025
In my autonomous systems lab, my partner and I were tasked with developing a custom PID controller and observer for a crazyflie quadcopter. In addition to this goal, we also teamed up with another group and created a more unique project to focus on. Our goal was to create a tracking system for our quadcopter that allowed it to track and land on a moving platform.
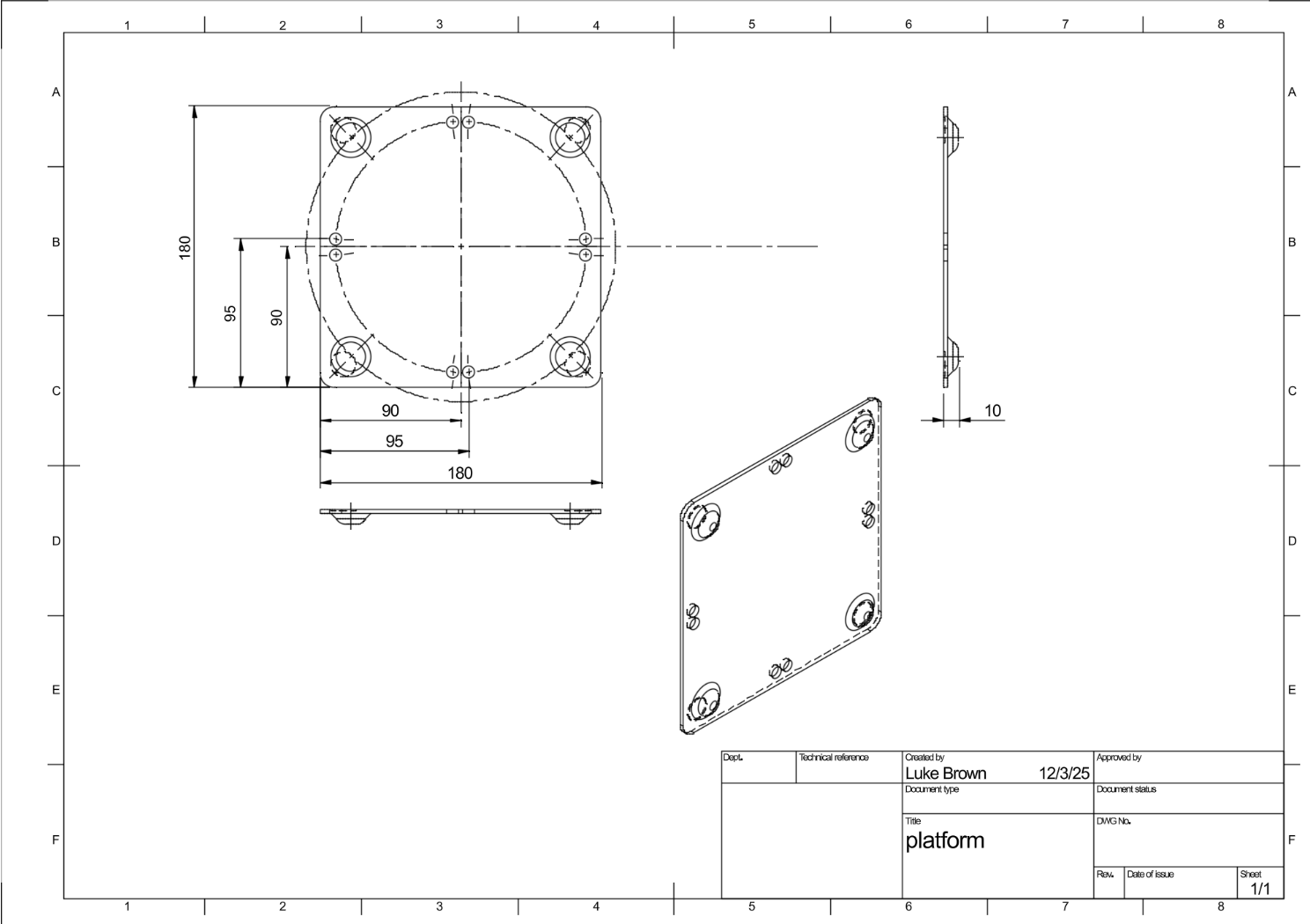
As a team, we decided to use the laboratory’s built in motion capture system to keep track of both our platform’s location, and our drone’s location. I designed and 3D printed the platform; adding points where rope could be attached for pulling, as well as divots for the 4 motion capture trackers. I also worked on figuring out how to pull motion capture data from each after every move command. The system for making the drone move involved calling a specific command, and motion capture data could only be accessed after the command was run. This presented a problem when tracking the platform, and I had to create a work around by writing functions that extracted the needed data after each command.
The video at the top of the page shows a trial of our tracking system, with the platform being pulled by a team member and the drone automatically tracking and landing on the platform. A detailed report on our efforts can be read here, and a video explaining the project can be found here.